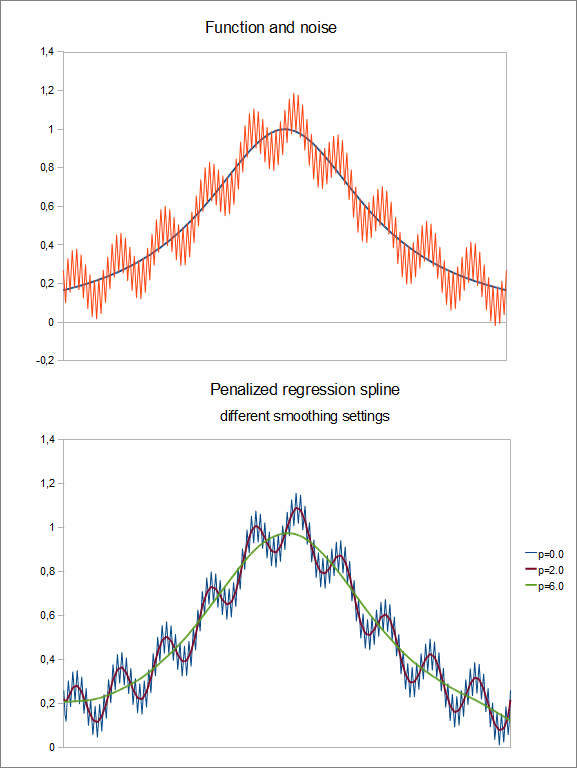
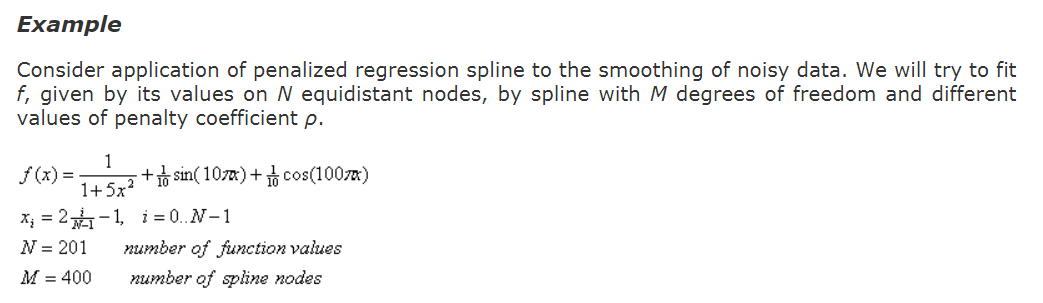
Здравствуйте. Нужно сделать аппроксимацию данных полученных с датчика движения.
Мне очень нравиться как это делают сплайны.
Особенно как это реализовано в alglib.
Но сейчас беда в том что алглиб можно пользовать только в личных целях. И тут он вообще не подходит никакх.
Подскажите пожалуйста каким образом можно достичь этого результата??
Желательно с кодом на С++, С#.
Интерполяцию я построил используя этот код но тут нету никакой возможности сгладить функцию. Результат стабильно включает в себя все исходные точки измерений.
Также буду благодарен если подкинете реализации МНК также на си. Я почему то сколько гуглю, результаты то на пакет математика то на питон и матлаб… (((