Здравствуйте.
Есть такая задачка:
Имеем датчик акселерометр+гироскоп. Он расположен на объекте Obj. и имеет свою систему координат.
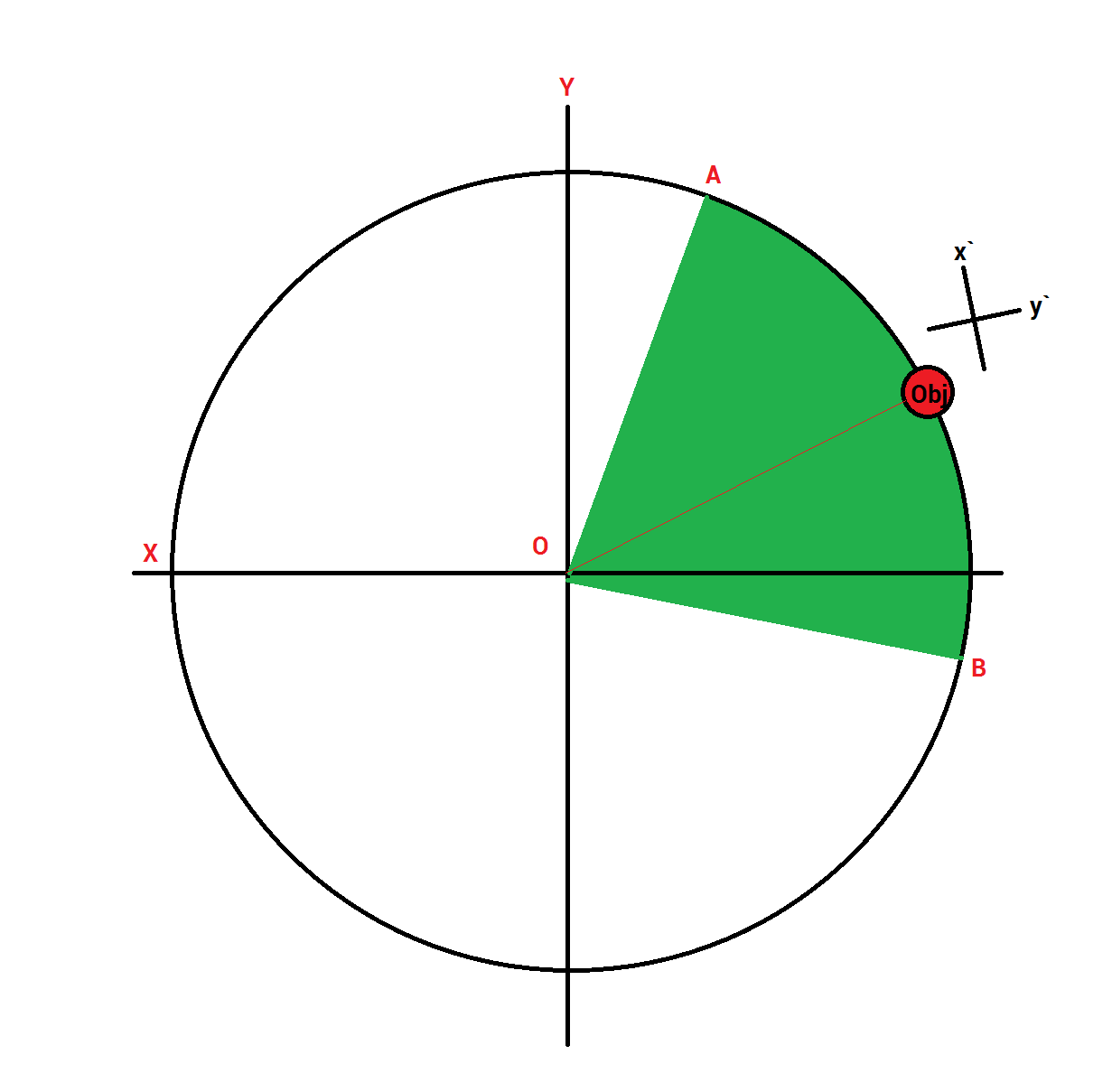
Делаю калибровку следующим методом. Датчик жестко закреплен и движется несколько раз по направлению AB - BA.
В результате калибровка нужно привести СК датчика к координатам XOY. То есть окончательным вариантом работы при указанном изменении я должен получить изменения датчика только в одной плоскости. По одной оси.
Изначально исходит вот из таких формул:
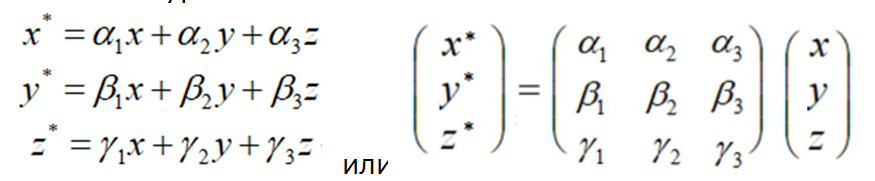
Но это не дало нужного результата. Может кто знает как решить задачу или подкинет ссылки на нужную литературу.
Спасибо.